7x24小时咨询热线
400-660-3310
当前位置 : 好学校 郑州PLC编程 盛世合工业技术培训中心 课程正文
微信扫码添加老师好友咨询
盛世合工业技术培训中心
认证等级
盛世合工业技术培训中心
已获好学校V2信誉等级认证
信誉值
与好学校签订读书保障协议:
课程详情
开班信息
校区地址
学校相册
读书保障
手机预订再优惠![]()

微信关注好学校
报读课程额外再返现

【课程介绍】
本课程专注于西门子SIMATIC S7-200 SMART系列PLC的系统化培训,该产品是西门子针对中国市场量身定制的高性价比小型PLC解决方案。课程涵盖其硬件配置、通信功能、编程组态及运动控制等核心内容,结合STEP 7-Micro/WIN SMART软件实操,帮助学员掌握小型自动化设备的集成与调试技术。
【课程目的】
旨在使学员全面掌握S7-200 SMART PLC的系统特性与功能应用,培养其独立完成硬件安装、通信配置、程序编写及故障诊断的能力,提升在小型自动化设备开发与维护中的实践水平。
【教学目标】
理解S7-200 SMART的模块化设计、通信接口(以太网/RS485)及扩展能力;
掌握STEP 7-Micro/WIN SMART软件下的硬件组态、程序结构设计及指令应用;
熟悉Modbus RTU/TCP、USS协议、开放式用户通信等通信协议的配置与集成;
能够完成高速计数、脉冲输出、PID控制及运动控制等工艺功能的实现;
掌握系统诊断、数据日志、配方管理及安全功能(访问保护、POU保护)的应用。
【教学内容】
系统基础:S7-200 SMART产品概述、V3.0新功能、安装与接线规范;
编程与组态:STEP 7-Micro/WIN SMART软件应用、程序结构(OB/FC/DB)、数据类型与寻址;
通信配置:以太网通信(GET/PUT)、RS485自由口通信、Modbus RTU/TCP主从站组态、USS协议驱动控制;
工艺功能:高速计数(HSC)、脉冲输出(PTO/PWM)、PID回路控制、运动控制(虚拟轴/PTO轴);
诊断与维护:系统块组态、非致命/致命错误处理、强制变量测试、存储卡应用;
高级应用:配方管理、数据日志记录、PROFINET智能设备集成、SINAMICS库指令应用。

【目录】
1----------S7-200 SMART CPU
2----------新功能S7-200 SMART V3.0 中的新增功能
3----------S7-200 SMART 扩展模块
4----------适用于 S7-200 SMART 的 HMI 设备
5----------通信选项
6----------编程软件
7----------网络安全信息
8----------安全说明
9----------安全概览
10---------网络安全
11---------进行以太网通信时使用的通信协议和端口号
12---------CPU 访问保护
13---------组态PLC安全
14---------PLC 保护(原有)
15---------禁用 PLC 访问控制
16---------启用PLC保护
17---------启用用户管理
18---------通信设置
19---------对通信进行组态
20---------保护项目
21---------设置项目密码
22---------POU 保护
23---------连接到 CPU
24---------组态 CPU 以进行通信
25---------概述
26---------建立以太网硬件通信连接
27---------与CPU建立以太网通信
28---------建立RS485硬件通信连接
29---------与CPU建立RS485通信
30---------创建示例程序
31---------为项目设置 CPU 的类型和版本
32---------保存示例项目
33---------下载示例程序
34---------更改 CPU 的工作模式
35----------S7-200 SMART 设备安装准则
36----------功率预算
37---------安装和拆卸步骤
38---------S7-200 SMART 设备的安装尺寸
39---------安装和拆卸 CPU
40---------安装和拆卸信号板或电池板
41---------拆卸和重新安装端子块连接器
42---------安装和拆卸扩展模块
43---------安装和卸下扩展电缆
44---------接线准则
45---------执行控制逻辑
46---------读取输入和写入输出
47---------执行用户程序
48---------访问数据
49---------访问存储区
50---------实数格式
51---------字符串格式
52---------分配指令的常数值
53---------对本地 I/O 和扩展 I/O 进行寻址
54---------使用指针进行间接寻址
55---------指针示例
56---------保存和恢复数据
57---------下载项目组件
58---------上传项目组件
59---------存储类型
60---------使用存储卡
61---------在标准 CPU 中插入存储卡
62---------通过存储卡传送程序
63---------上电后恢复数据
64---------更改 CPU 的工作模式
65---------状态 LED
66----------设计 PLC 系统的指南
67----------用户程序的元素
68----------创建用户程序
69----------早期版本的 STEP 7-Micro/WIN 项目
70----------使用 STEP 7-Micro/WIN SMART V3 用户界面
71----------使用 STEP 7-Micro/WIN SMART V3 创建程序
72----------借助向导创建控制程序
73---------- LAD 编辑器的功能
74----------FBD 编辑器的功能
75----------数据块 (DB) 编辑器
76----------全局变量表
77----------局部变量表
78----------PLC 错误响应
79---------S7-200 SMART CPU 中的错误处理
80---------系统信息
81---------系统
82---------CPU
83---------PROFINET设备
84---------PLC日志
85---------扫描速率
86---------非致命错误和 I/O 错误
87---------致命错误
88---------在 RUN 模式下执行程序编辑
89---------用于调试程序的功能
90---------组态 PLC 系统的操作
91---------系统块
92---------对通信进行组态
93---------组态数字量输入
94---------组态数字量输出
95---------组态保持范围
96---------组态启动选项
97---------组态模拟量输入
98---------模拟量输入技术规范参考
99---------组态模拟量输出
100--------模拟量输出技术规范参考
101--------组态RTD模拟量输入
102--------组态TC模拟量输入
103--------组态RS485/RS232 CM01通信信号板
104--------组态BA01电池信号板
105--------清除PLC存储区
106--------创建复位为出厂默认存储卡
107--------高速 I/O
108--------位逻辑
109--------标准输入
110--------立即输入
111--------逻辑堆栈概述
112--------STL 逻辑堆栈指令
113 --------NOT
114--------正跳变和负跳变检测器
115--------线圈: 输出和立即输出指令
116--------置位、复位、立即置位和立即复位功能
117--------置位和复位优先双稳态触发器
118--------NOP(空操作)指令
119--------交替输出和脉冲交替输出
120--------位逻辑输入示例
121--------位逻辑输出示例
122--------时钟
123--------读取和设置实时时钟
124--------读取和设置扩展实时时钟
125--------通信
126-------- GET和PUT(以太网)
127--------发送和接收(RS485/RS232 为自由端口)
128--------获取端口地址和设置端口地址(RS485/RS232 上的 PPI 协议)
129--------获取 IP 地址和设置 IP 地址(以太网)
130-------开放式用户通信
131-----OUC 指令
132-----OUC 指令错误代码
133--------比较
134------比较数值
135------比较字符串
136--------转换
137------标准转换指令
138------ASCII 字符数组转换
139------数值转换为 ASCII 字符串
140------ASCII 子字符串转换为数值
141------编码和解码
142------量程变换
143--------计数器
144------计数器指令
145------高速计数器指令
146------高速计数器汇总
147------高速输入降噪
148------高速计数器编程
149------高速计数模式的初始化顺序示例
150------高速频率模式的初始化顺序示例
151--------脉冲输出
152--------脉冲输出指令 (PLS)
153--------脉冲串输出 (PTO)
154--------脉宽调制 (PWM)
155--------使用 SM 位置组态和控制 PTO/PWM 操作
156----------数学运算
157--------加法、减法、乘法和除法
158--------产生双整数的整数乘法和带余数的整数除法
159--------三角函数、自然对数/自然指数和平方根
160--------递增和递减
161--------取值或最小值
162--------取随机值
163--------数组进行排序
164--------取数组的平均值
165--------取值
166--------低通滤波器
167--------PID
168--------PID 回路指令
169--------使用 PID 向导
170--------PID 算法
171--------转换和标准化回路输入
172--------将回路输出转换为标定整数值
173--------正作用或反作用回路
174--------抗积分饱和
175--------中断
176--------中断指令
177--------中断例程概述和 CPU 型号事件支持
178--------中断编程准则
179--------S7-200 SMART CPU 支持的中断事件类型
180--------中断优先级、排队和示例程序
181--------逻辑运算
182--------取反
183--------AND、OR、XOR、NAND、NOR 和 NXOR
184--------传送
185--------传送
186--------字节、字、双字或实数传送
187--------块传送
188--------交换字节
189--------字节立即传送(读取和写入)
190--------程序控制
191--------FOR-NEXT 循环
192--------JMP(跳转至标号)
193--------SCR(顺控继电器)
194--------END、STOP 和 WDR(看门狗定时器复位)
195--------GET_ERROR(获取非致命错误代码)
196--------移位和循环移位
197--------移位和循环移位
198--------移位寄存器位
199--------字符串
200--------字符串(获取长度、复制和连接)
201--------从字符串中复制子字符串
202--------在字符串中查找字符串和个字符
203--------定时器
204--------定时器指令
205--------定时器编程提示和示例
206--------时间间隔定时器
207--------CPU 通信连接
208--------CPU 通信端口
209--------HMI 和通信驱动程序
210--------以太网
211--------概述
212--------本地/伙伴连接
213--------以太网网络组态示例
214--------分配 Internet 协议 (IP) 地址
215--------为编程设备和网络设备分配 IP 地址
216--------为项目22中的 CPU 或设备组态或更改 IP 地址
217--------搜索以太网网络上的 CPU 和设备
218--------查找 CPU 上的以太网 (MAC) 地址
219--------HMI 与 CPU 通信
220--------开放式用户通信
221--------协议
222--------连接
223--------端口
224--------PROFINET 通信
225--------简介
226--------智能设备
227--------PROFINET 设备命名
228--------PROFINET 网络的 LED 状态指示灯
229--------将 CPU 组态为控制器
230--------将 CPU 组态为不带下级 PROFINET IO 系统的智能设备
231--------RS485
232--------PPI 协议
233--------波特率和网络地址
234--------波特率和网络地址定义
235--------为 S7-200 SMART CPU 设置波特率和网络地址
236--------RS485 网络组态示例
237--------单主站 PPI 网络
238--------多主站和多从站 PPI 网络
239--------分配 RS485 地址
240--------为项目中的 CPU 或设备组态或更改 RS485 地址
241--------搜索 RS485 网络中的 CPU 和设备
242--------构建网络
243--------通用准则
244--------确定网络的距离、传输率和电缆长度
245--------网络中的中继器
246--------RS485 电缆规范
247--------连接器引脚分配
248--------偏置和端接网络电缆
249--------偏置和端接 CM01 信号板在 RS485 网络中使用 HMI备
250--------自由端口模式
251--------使用自由端口模式创建用户定义的协议
252--------对 RS232 设备使用 RS232/PPI 多主站电缆和自由端口模式
253--------RS232
254--------库类型(Siemens 及用户定义)
255--------创建用户定义的指令库
256---------Modbus 通信概述
257 --------Modbus 寻址
258--------Modbus 读取和写入功能
259--------Modbus RTU 库指令
260--------Modbus RTU 通信概述
261--------Modbus RTU 库功能
262--------使用 Modbus 指令的要求
263--------Modbus 协议的初始化和执行时间
264--------Modbus RTU 主站
265 -------使用 Modbus RTU 主站指令
266--------MBUS_CTRL/MB_CTRL2/MB_CTRL3 指令(初始化主站)
267--------MBUS_MSG/MB_MSG2/MB_MSG3 指令
268--------Modbus RTU 主站执行错误代码
269--------Modbus RTU 从站
270--------使用 Modbus RTU 从站指令
271--------MBUS_INIT 指令(初始化从站)
272--------MBUS_SLAVE 指令
273--------Modbus RTU 从站执行错误代码
274--------Modbus RTU 主站示例程序
275--------Modbus RTU 高级用户信息
276--------Modbus TCP 库
277--------Modbus TCP 库功能
278--------Modbus TCP 客户端
279--------MBUS_CLIENT 指令
280--------Modbus TCP 客户端执行错误代码
281--------Modbus TCP 服务器
282--------MBUS_SERVER 指令
283--------Modbus TCP 服务器执行错误代码
284--------示例:Modbus TCP 应用程序
285--------Modbus TCP 高级用户信息
286--------Modbus TCP 常规异常代码
287--------Modbus TCP 常规通信异常代码
288--------开放式用户通信库
289--------概述
290--------OUC 库指令共用的参数
291--------开放式用户通信库指令
292--------TCP_CONNECT 指令
293--------ISO_CONNECT 指令
294--------UDP_CONNECT 指令
295--------TCP_SEND 指令
296--------TCP_RECV 指令
297--------UDP_SEND 指令
298--------UDP_RECV 指令
299--------DISCONNECT 指令
300--------开放式用户通信库指令错误代码
301--------开放式用户通信库示例
302--------主动伙伴(客户端)
303--------CheckErrors 子例程
304--------主动伙伴变量表
305--------被动伙伴(服务器)
306--------CheckErrors 子例程
307--------被动伙伴变量表
308--------PN Read Write Record 库
309--------PN Read Write Record 特性
310--------PN Read Write Record 库的输入和输出接口
311--------为输入信号“STATUS”定义参数
312--------PN Read Write Record 库的系统定义错误代码
313--------USS 协议库指令
314--------USS 通信概述
315--------USS 协议概述
316--------使用 USS 协议的要求
317--------计算与驱动器通信所需的时间
318--------USS 程序指令
319--------使用 USS 协议指令
320 --------USS_INIT 指令
321--------USS_CTRL 指令
322--------USS_RPM_x 指令
323--------USS_WPM_x 指令
324--------USS 协议示例程序
325--------USS 协议执行错误代码
326--------SINAMICS 库
327--------SINAMICS 库特性
328--------SINA_POS 指令
329--------概述
330--------使用 SINA_POS 指令的前提
331--------SINA_POS 指令的输入和输出接口
332--------带 SINA_POS 指令的 SINAMICS 模式选择
333--------相对运动
334--------运动
335--------恒速模式
336--------主动回零
337--------设置参考点
338--------运行程序段
339--------点动
340--------增量点动
341--------编码器调整
342--------SINA_SPEED 指令
343--------使用 SINA_SPEED 指令的前提
344--------SINA_SPEED 指令的输入和输出接口
345--------“ConfigAxis”参数的定义
346--------SINA_SPEED 指令示例
347--------SINA_PARA_S 指令
348--------使用 SINA_PARA_S 指令的前提
349--------SINA_PARA_S 指令的输入和输出接口
350--------SINA_PARA_S 指令示例
351--------调试程序
352--------书签
353--------交叉引用表
354--------显示程序状态
355--------显示程序编辑器中的状态
356--------组态 STL 状态选项
357--------使用状态图来监视程序
358--------强制特定值
359--------在 STOP 模式下写入和强制输出
360--------如何执行有限次数的扫描
361--------硬件故障排除指南
362--------操作步骤
363--------添加和组态运动控制组件
364--------添加运动控制组件
365--------组态虚拟轴
366--------虚拟轴基本设置
367--------机械及限位
368--------参数
369--------诊断信息
370--------组态 PTO 轴
371--------PTO 轴基本设置
372--------机械及限位
373--------参数
374--------回原点
375--------其他
376--------诊断信息
377--------组态编码器轴
378--------编码器轴基本设置
379--------机械及限位
380--------探针
381--------诊断信息
382--------组态凸轮
383--------组态凸轮表
384--------设置参数
385--------查看曲线
386--------导入/导出凸轮表
387--------使用控制面板进行调试(仅适用于 PTO 轴)
388--------运动控制指令
389--------变量概览
390--------运动控制系统变量
391--------单轴命令缓冲模式
392--------使用数组实现多轴控制
393--------基本指令
394--------MC_Power
395--------MC_TouchProbe
396--------MC_AbortTrigger
397--------MC_Reset
398 -------MC_Home
399--------MC_Stop
400--------MC_Halt
401--------MC_MoveAbsolute
402--------MC_MoveRelative
403--------MC_MoveVelocity
404--------MC_ImmediateStop
405--------MC_MoveJog
406--------凸轮和齿轮指令
407--------MC_CamIn
408--------MC_CamOut
409--------MC_GearIn
410--------MC_GearOut
411--------MC_PhasingRelative
412--------错误代码
413--------单轴运动的错误代码
414--------电子凸轮的错误代码
415--------示例程序
416--------单轴示例
417--------凸轮实例
418--------常规规范
419--------常规技术规范
420--------S7-200 SMART CPU
421--------CPU ST40 和 CPU SR40
422--------常规规范和特性
423--------数字量输入和输出
424--------接线图
425--------CPU ST60 和 CPU SR60
426--------常规规范和特性
427--------数字量输入和输出
428--------接线图
429--------漏型、源型输入和继电器输出的接线图
430--------数字量输入和输出扩展模块 (EM)
431--------EM DE08 和 EM DE16 数字量输入规范
432--------EM DT08、EM DR08、EM QR16 和 EM QT16 数字量输出规范
433--------EM DT16、EM DR16、EM DT32 和 EM DR32 数字量输入/输出规范
434--------模拟量输入和输出扩展模块 (EM)
435--------EM AE04 和 EM AE08 模拟量输入规范
436--------EM AQ02 和 EM AQ04 模拟量输出模块规范
437--------EM AM03 和 EM AM06 模拟量输入/输出模块规范
438--------模拟量输入的阶跃响应
439--------模拟量输入的采样时间和更新时间
440--------模拟量输入的电压和电流测量范围(SB 和 SM)
441--------模拟量输出的电压和电流测量范围(SB 和 EM)
442--------热电偶模块和 RTD 扩展模块 (EM)
443--------热电偶扩展模块 (EM)
444--------EM AT04 热电偶规范
445--------RTD 扩展模块 (EM)
446--------数字信号板
447--------SB DT04 数字量输入/输出规范
448--------模拟信号板
449--------SB AE01 模拟量输入规范
450--------SB AQ01 模拟量输出规范
451--------RS485/RS232 信号板
452--------SB RS485/RS232 规范
453--------电池板信号板 (SB)
454--------SB BA01 电池板
455--------S7-200SMART电缆1101
456--------S7-200 SMART I/O 扩展电缆
457--------RS-232/PPI 多主站电缆和 USB/PPI 多主站电缆
458--------概述
459--------RS-232/PPI 多主站电缆
460--------USB/PPI 多主站电缆
461--------计算功率预算
462--------功率预算
463--------功率要求计算示例
464--------计算功率要求
465--------时间戳不匹配
466--------PLC 非致命错误代码
467--------PLC 非致命错误 SM 标志
468--------PLC 致命错误代码
469--------PROFINET 报警
470--------SM(特殊存储器)概述
471-------- SMB0: 系统状态
472--------SMB1: 指令执行状态
473--------SMB2: 自由端口接收字符
474--------SMB3: 自由端口字符错误
475--------SMB4: 中断队列溢出、运行时程序错误、中断启用、自由端口发送器空闲和强制值.1126
476--------SMB5: I/O 错误状态
477--------SMB6-SMB7: CPU ID、错误状态和数字量 I/O 点
478--------SMB8-SMB19、SMB131-SMB134:I/O 模块 ID 和错误
479--------SMW22-SMW26:扫描时间
480--------SMB28-SMB29、SMB32-SMB33:信号板 ID 和错误
481--------SMB30:(端口 0)、SMB130:(端口 1)和 SMB31:(端口 2)
482--------SMB34-SMB35: 定时中断的时间间隔
483
SMB36-SMB45 (HSC0)、SMB46-SMB55 (HSC1)、SMB56-SMB65 (HSC2)、SMB136-
SMB145 (HSC3)、SMB146-SMB155 (HSC4)、SMB156-SMB165 (HSC5)、SMB360-
SMB369 (HSC6)、SMB370-SMB379 (HSC7):高速计数器
484
SMB66-SMB85 (PTO0/PWM0, PTO1/PWM1)、SMB166-SMB169 (PTO0)、SMB176-
SMB179 (PTO1)、SMB566-SMB579 (PTO2/PWM2)、SMB580-SMB593 (PTO3/
PWM3)、SMB2000-SMB2013 (PTO4/PWM4):高速输出
485--------SMB86-SMB94、SMB186-SMB194 和 SMB405-SMB413:接收信息控制
486--------SMW98:扩展 I/O 总线通信错误
487--------SMW100-SMW120 系统报警
488--------SMB195-SMB210:HSC 类型和频率测量采样周期
489--------SMB220-SMB235:PID 控制错误代码
490--------SMB380-SMB404:HSC 用户自定义引脚映射启用
491--------SMB480-SMB515: 数据日志状态
492--------SMB600-SMB799:轴(0、1、2 和 3)开环运动控制(适用于运动控制 (V2.x))
493--------SMB600-SMB649:轴 0 开环运动控制
494--------SMB650-SMB699:轴 1 开环运动控制
495--------SMB700-SMB749:轴 2 开环运动控制
496--------SMB750-SMB799:轴 3 开环运动控制
497--------SMB800-SMB858:轴组 0 开环运动控制
498--------SMB870-SMB928:轴组 1 开环运动控制
499--------SMB1000-SMB1049: CPU 硬件/固件 ID
500--------SMB950-SMB998、SMB1050-SMB1099:SB(信号板)硬件/固件 ID
501--------SMB1100-SMB1399、SMB250-SMB349:EM(扩展模块)硬件/固件 ID
502--------SMB1400-SMB1799:EM(扩展模块)模块特定的数据
503--------SMB1800-SMB1939:PROFINET 设备状态
【教学优势】
一对一教学有西门子,ABB,施耐德,三菱,欧姆龙,一人一机,和利时DCS,ABB,施耐德,三菱,欧姆龙,均为中型机(对标西门子1500)且人手一机。涵盖PLC+触摸屏+上位机+变频私服+电气设计(非识图,接线,认识原件等小学生技术)+柜子设计+造价+现场施工真正做到全面性,系统性。
【师资优势】
郑州地区设备型号最全,课程最多,技术最深入,涵盖PLC+触摸屏+上位机+变频私服+电气设计+柜子设计+造价+现场施工。7个月-12个月的系统化培训。使你更加符合企业所需。西门子,ABB,施耐德,三菱,欧姆龙,和利时DCS,使你入行或就业拥有更高的竞争力。
【环境优势】
各个教室不在同一地区,距离均超过2公里,做到真正的10人小班,互不干扰,真正的一对一指导教学。封闭式考研模式,学员之间不能互相干扰,以确保各个学员的学习质量。

【机构简介】
盛世合工业技术有限公司为一家专业自动化技术服务集成商,下设有自动化工程PLC,DCS设计部,电气成套设计,实施部,财务部,综合管理部,采购部,宣传部及工业技术咨询服务及企业自控技术指导等自化专业技术服务部门。企业有着相当成熟的自动化工程经验。涵盖水厂,泵站,智慧林业,城市智慧管网调度,热力,物联网技术,矿山,砂石骨料生产线,水泥生产线,建材回收生产线,固体废物处理回收生产线,钢铁,食品,饮料,及肥料生产线的系统设计集成及电气成套设计经验及丰富的机电设备安装工程。郑州公司为我司技术服务为主体业务,为客户及学员提供全套的,系统性,专业性的技术指导及服务,涉及PLC,触摸屏,DCS,上位机,变频器技术,伺服技术,步进技术,电气系统技术,为企业及个人提供优质的技术咨询及服务。
公司门牌

校区地址
学校相册
更多 >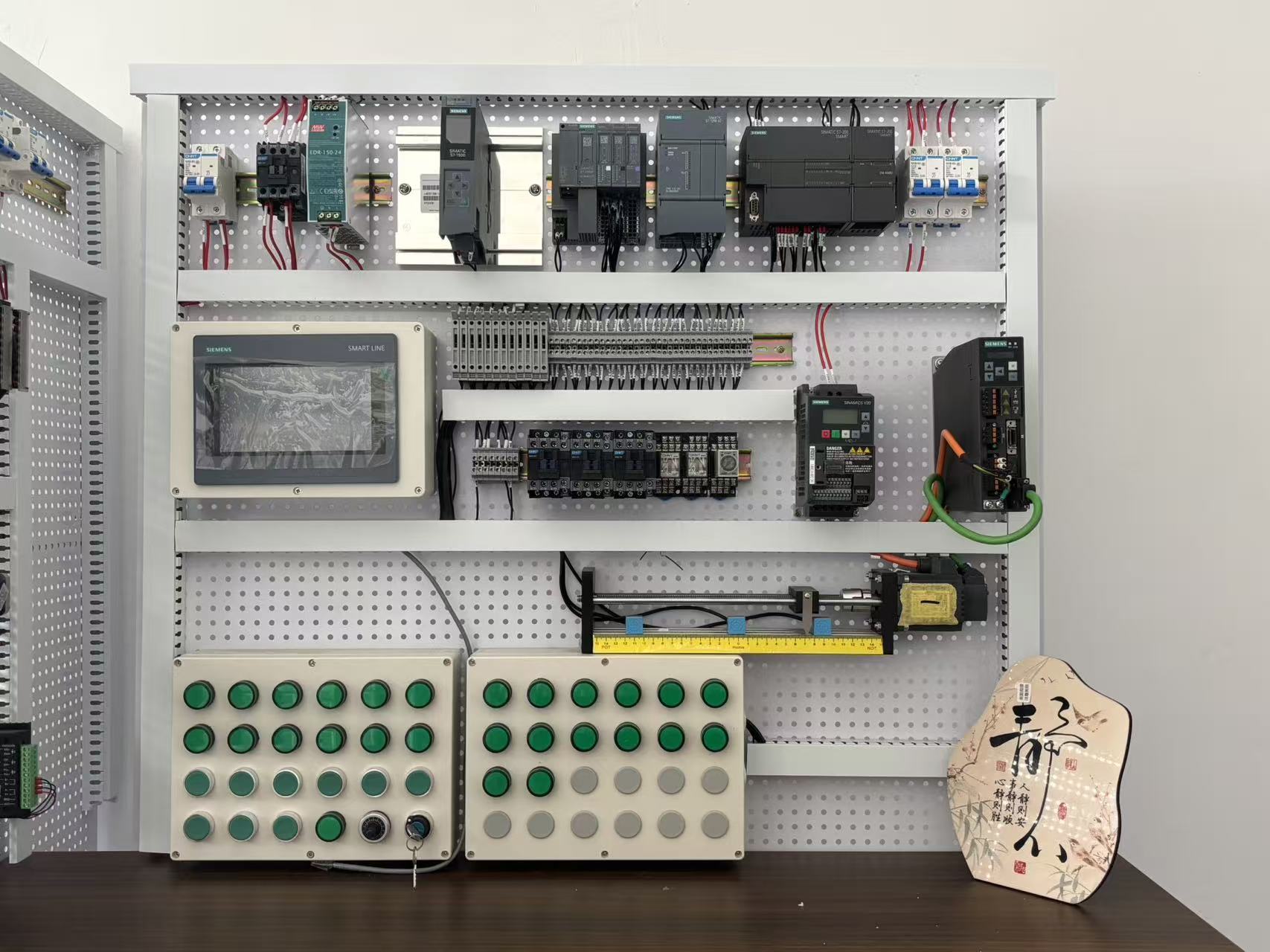



看过的人还关注了
更多适合课程
全城PLC编程学校,一网打尽,立即搜索:
在线预约免费试听




.png)
.png)
.png)
.png)




 官方授权声明
官方授权声明

 粤公网安备 44010602004272号
粤公网安备 44010602004272号