7x24小时咨询热线
400-660-3310
当前位置 : 好学校 郑州PLC编程 盛世合工业技术培训中心 课程正文
盛世合工业技术培训中心
认证等级
盛世合工业技术培训中心
已获好学校V2信誉等级认证
信誉值
与好学校签订读书保障协议:
课程详情
开班信息
校区地址
学校相册
读书保障
手机预订再优惠![]()

微信关注好学校
报读课程额外再返现

【课程介绍】
本课程专注于西门子SIMATIC S7-1200 G2系列PLC的系统化培训,涵盖其紧凑型设计、集成I/O、通信选项及模块化扩展特性。课程通过理论与实践相结合的方式,深入讲解S7-1200 G2的硬件配置、编程组态、运动控制及故障安全功能,帮助学员掌握适用于中低性能自动化任务的解决方案。
【课程目的】
旨在使学员全面掌握S7-1200 G2 PLC的系统架构与功能特性,培养其独立完成硬件安装、程序编写、通信配置及系统诊断的能力,提升在工业自动化领域的实践应用水平。
【教学目标】
理解S7-1200 G2的模块化设计、板件扩展及PushIn接线技术;
掌握TIA Portal软件下的硬件组态、程序结构设计及指令应用;
熟悉PROFINET、点对点通信、Modbus TCP等通信协议的配置;
能够完成运动控制、PID调节、高速计数等工艺功能的实现与调试;
掌握系统诊断、在线调试、数据日志及配方管理等高级操作;
【教学内容】
系统基础:S7-1200 G2产品概述、模块与板件特性、安装与接线规范;
编程与组态:TIA Portal工程软件应用、组织块(OB/FC/FB/DB)编程、数据块管理;
工艺功能:高速计数(HSC)、PID控制、运动控制(轴组态、定位指令)、脉冲输出(PTO/PWM);
通信配置:PROFINET IO设备组态、开放式用户通信(TCP/ISO on TCP/UDP)、Modbus RTU/TCP集成;
诊断与维护:在线诊断工具使用、强制变量测试、固件更新、存储卡应用;
高级应用:配方管理、数据日志记录、OPC UA服务器配置、安全功能(访问保护、专有技术保护)。
【课程优势】
注重实操能力培养,结合实例演示从硬件安装到复杂功能调试的全流程;
包含PROFINET智能设备、共享设备等高级通信应用,符合现代工业网络需求;
提供标准化项目设计与调试方法,增强解决实际问题的能力。
【目录】
1----------产品概述
2----------S7-1200 G2 PLC 介绍
3----------S7-1200 G2 模块和板件
4----------特性
5----------安装和布线
6----------安装指南.
7----------安全信息
8----------安装尺寸
9----------提供 CPU 电源
10---------CPU 的扩展功能
11---------安装和拆卸操作步骤
12---------安装和拆卸 CPU
13---------安装和移除扩展模块
14---------安装和拆卸扩展板
15---------拆卸和安装端子块连接器
16---------接线指南和程序
17---------安全考虑要素
18---------绝缘准则
19---------接地指南
20---------接线指南
21---------端子块连接器的接线和拆卸
22---------感性负载的使用准则
23---------灯负载的使用准则
24---------维护与维修
25---------安装
26---------S7-1200 设备安装准则
27---------功率预算
28---------安装和拆卸步骤
29---------S7-1200 设备的安装尺寸
30---------安装和拆卸 CPU
31---------安装和拆卸 SB、CB 或 BB
32---------安装和拆卸 SM
33---------安装和拆卸 CM 或 CP
34---------拆卸和重新安装 S7-1200 端子板连接器
35---------安装和卸下扩展电缆
36---------TS(远程服务)适配器
37---------连接远程服务适配器
38---------安装 SIM 卡
39---------将 TS 适配器单元安装在 DIN 导轨上
40---------将 TS 适配器安装到面板上
41---------接线准则
42---------PLC概念、组态和编程
43---------TIA Portal
44---------TIA Portal 中的不同视图
45---------使用 TIA Portal 信息系统
46---------程序结构
47---------STEP 7 用户程序的结构
48---------执行用户程序
49---------启动组态和处理
50--------在 RUN 模式下处理扫描周期
51--------组织块 (OB)
52--------程序循环 OB
53--------启动 OB
54--------延时中断 OB
55--------循环中断 OB
56--------硬件中断 OB
57--------时间错误中断 OB
58--------诊断错误中断 OB
59--------拔出或插入模块 OB
60--------机架或站故障 OB
61--------时钟 OB
62--------同步循环 OB
63--------状态 OB
64--------更新 OB
65--------配置文件 OB
66--------MC 伺服和 MC插补器 OB
67--------MC-PreInterpolator
68--------MC-PreServo
69--------MC-PostServo
70--------MC-LookAhead
71--------编程错误 OB
72-------I/O 访问错误 OB
73--------事件执行的优先级与排队
74--------监视和组态循环时间
75--------循环时间和通信负载
76--------CPU 存储器
77--------存储器管理
78--------保持性存储器的相关说明
79--------系统和时钟存储器
80--------诊断缓冲区
81--------程序报警
82--------日时钟
83--------数据存储、存储区、I/O 和寻址
84--------访问 CPU 的数据
85--------使用寻址方式访问 CPU 数据
86--------对本地 I/O 和扩展 I/O 进行寻址
87--------模拟值的处理
88--------使用存储卡
89--------存储卡
90--------在 CPU 中插入存储卡
91--------空存储卡
92--------将项目复制到存储卡之前组态 CPU 的启动参数
93--------将存储卡用作“传送”卡
94--------将存储卡用作“程序”卡
95--------固件更新卡
96--------保护机密 PLC 组态数据的存储卡
97-------丢失密码后恢复
98--------用于从 CPU 复制许可条件和版权的存储卡
99--------管理用户和角色
100--------设备组态
101--------总览
102--------插入 CPU
103--------上传已连接 CPU 的组态
104--------将模块添加到组态
105--------组态 CPU 的操作
106--------组态系统电源
107--------组态模块的参数
108--------组态 CPU 以进行通信
109--------时间同步
110--------STEP 7 版本与 S7-1200 G2 CPU 的兼容性
111--------指令集
112--------支持的编程语言
113--------PLC 编程说明
114--------基本指令
115--------扩展指令
116--------工艺指令
117--------通信指令
118--------可选指令
119--------设备配置
120--------插入 CPU
121--------上传已连接 CPU 的组态
122--------将模块添加到组态
123--------组态控制
124--------组态控制的优点和应用
125--------组态集中安装和可选模块
126--------组态控制示例
127--------更改设备
128--------组态 CPU 的运行
129--------概述
130--------组态数字量输入滤波时间
131--------脉冲捕捉
132--------组态多语言支持
133--------组态模块的参数
134--------组态 CPU 以进行通信
135--------时间同步
136--------编程概念
137--------设计 PLC 系统的指南
138--------构建用户程序
139--------使用块来构建程序
140--------组织块 (OB)
141--------功能 (FC)
142--------功能块 (FB)
143--------数据块 (DB)
144--------创建可重复使用的代码块
145--------向块传递参数
146--------了解数据一致性
147--------编程语言
148--------梯形图 (LAD)
149--------功能块图 (FBD)
150-------- SCL
151 --------SCL 程序编辑器
152--------SCL 表达式和运算
153--------使用 PEEK 和 POKE 指令进行索引寻址
154-------- LAD、FBD 和 SCL 的 EN 和 ENO
155--------保护
156--------CPU 的访问保护
157--------外部装载存储器
158--------专有技术保护
159--------复制保护
160--------下载程序的元素
161--------将在线 CPU 与离线项目同步
162--------从在线 CPU 上传
163--------将在线 CPU 与离线 CPU 进行比较
164--------调试和测试程序
165--------监视和修改 CPU 中的数据
166--------监视表格和强制表格
167--------用于显示使用情况的交叉引用
168--------用于检查调用层级的调用结构
169--------基本指令
170--------位逻辑运算
171--------位逻辑指令
172--------置位和复位指令
173--------上升沿和下降沿指令
174--------定时器运行
175--------计数器操作
176--------比较运算
177--------比较值指令
178-------- IN_Range(范围内值)和 OUT_Range(范围外值)
179 --------OK(检查有效性)和 NOT_OK(检查无效性)
180---------变型和数组比较指令
181--------相同和不同比较指令
182--------空比较指令
183--------IS_ARRAY(检查数组)
184--------数学函数
185-------- CALCULATE(计算)
186--------加法、减法、乘法和除法指令
187-------- MOD(返回除法的余数)
188-------- NEG(取反)
189 --------INC(递增)和 DEC(递减)
190 --------ABS(计算值)
191 --------MIN(获取最小值)和 MAX(获取值)
192 --------LIMIT(设置限值)
193---------指数、对数及三角函数指令
194---------移动操作
195 --------MOVE(移动值)、MOVE_BLK(移动块)、UMOVE_BLK(无中断移动块)和
MOVE_BLK_VARIANT(移动块)
196-------- Deserialize
197-------- Serialize
198-------- FILL_BLK(填充块)和 UFILL_BLK(无中断填充块)
199-------- SWAP(交换字节)
200--------LOWER_BOUND:(读取 ARRAY 下限)
201-------- UPPER_BOUND:(读取 ARRAY 上限)
202--------读/写存储器指令
203-------- PEEK 和 POKE(仅 SCL)
204--------读取和写入大尾和小尾指令 (SCL)
205--------Variant 指令
206 --------VariantGet(读取 VARIANT 变量值)
207 --------VariantPut(写入 VARIANT 变量值)
208--------CountOfElements(获取 ARRAY 元素数目)
209--------早期指令
210-------- FieldRead(读取域)和 FieldWrite(写入域)指令
211 --------SCATTER
212 --------SCATTER_BLK
213--------GATHER
214-------- GATHER_BLK
215--------转换操作
216 --------CONV(转换值)
217-------- SCL 的转换指令
218--------ROUND(取整)和 TRUNC(截尾取整)
219 --------CEIL 和 FLOOR(浮点数向上和向下取整)
220 --------SCALE_X(标定)和 NORM_X(标准化)
221--------变量转换指令
222 --------VARIANT_TO_DB_ANY(将 VARIANT 转换为 DB_ANY)
223-------- DB_ANY_TO_VARIANT(将 DB_ANY 转换为 VARIANT)
224--------程序控制操作
225-------- JMP(RLO = 1 时跳转)、JMPN(RLO = 0 时跳转)和 Label(跳转标签)指令
226---------JMP_LIST(定义跳转列表)
227-------- SWITCH(跳转分配器)
228-------- RET(返回)
229-------- ENDIS_PW(启用/禁用 CPU 密码)
230 --------RE_TRIGR(重置周期监视时间)
231---------STP(退出程序)
232--------GET_ERROR 和 GET_ERROR_ID(获取本地错误信息和获取本地错误 ID)指令
233-------- RUNTIME(测量程序运行时间)
234-------- SCL 程序控制语句
235--------SCL 程序控制语句概述
236--------IF-THEN 语句
237--------CASE 语句
238--------FOR 语句
239--------WHILE-DO 语句
240--------REPEAT-UNTIL 语句
241--------CONTINUE 语句
242--------EXIT 语句
243--------GOTO 语句
244--------RETURN 语句
245--------字逻辑指令
246-------- AND、OR 和 XOR 逻辑运算指令
247-------- INV(求反码)
248 --------DECO(解码)和 ENCO(编码)指令
249--------SEL(选择)、MUX(多路复用)和 DEMUX(多路分用)指令
250--------移位与循环移位
251 --------SHR(右移)和 SHL(左移)指令
252--------ROR(循环右移)和 ROL(循环左移)指令
253--------扩展指令
254--------日期、时间和时钟功能
255--------日期和时钟指令
256--------时钟功能
257-------- TimeTransformationRule 数据结构
258-------- SET_TIMEZONE(设置时区)
259-------- RTM(运行时间计时器)
260--------字符串和字符
261 --------String 数据概述
262-------- S_MOVE(移动字符串)
263--------字符串转换指令
264-------- S_CONV、STRG_VAL 和 VAL_STRG(在字符串与数值之间转换)指令
265-------- Strg_TO_Chars 和 Chars_TO_Strg(在字符串与字符数组之间转换)指令
266-------- ATH 和 HTA(在 ASCII 字符串与十六进制数之间转换)指令
267--------字符串操作指令
268 --------MAX_LEN(字符串的长度)
269 --------LEN(确定字符串的长度)
270 --------CONCAT(合并字符串)
271-------- LEFT、RIGHT 和 MID(读取字符串中的子串)指令
272-------- DELETE(删除字符串中的字符)
273-------- INSERT(在字符串中插入字符)
274-------- REPLACE(替换字符串中的字符)
275-------- FIND(在字符串中查找字符)
276---------运行系统信息
277-------- GetSymbolName(读取输入参数的变量)
278 --------GetSymbolPat(查询输入参数分配的复合全局名称)
279 --------GetInstanceName(读取块实例的名称)
280 --------GetInstancePath(查询块实例的复合全局名称)
281-------- GetBlockName(读取块名称)
282--------分布式 I/O(PROFINET、PROFIBUS 或 AS-Interface)
283--------分布式 I/O 指令
284-------- RDREC 和 WRREC(读/写数据记录)
285 --------GETIO(读取过程映像)
286 --------SETIO(传送过程映像)
287 --------GETIO_PART(读取过程映像区域)
288 --------SETIO_PART(传送过程映像区域)
289-------- RALRM(接收中断)
290---------D_ACT_DP(启用/禁用 PROFINET IO 设备)
291 --------RDREC、WRREC 和 RALRM 的 STATUS 参数
292---------其它
293 --------DPRD_DAT 和 DPWR_DAT(读/写一致性数据)
294-------- RCVREC(智能设备/智能从站接收数据记录)
295-------- PRVREC(智能设备/智能从站使数据记录可用)
296-------- DPNRM_DG(读取 PROFIBUS DP 从站的诊断数据)
297-------- PROFIenergy
298--------中断
299--------ATTACH 和 DETACH(附加/分离 OB 和中断事件)指令
300--------循环中断
301 -------SET_CINT(设置循环中断参数)
302--------QRY_CINT(查询循环中断参数)
303--------时钟中断
304--------SET_TINTL(设置时钟中断)
305--------CAN_TINT(取消时钟中断)
306--------ACT_TINT(激活时钟中断)
307 --------QRY_TINT(查询时钟中断状态)
308--------延时中断
309--------DIS_AIRT 和 EN_AIRT(延迟/启用较高优先级的中断和异步错误事件)指令
310--------报警
311-------- Gen_UsrMsg(生成用户诊断报警)
312--------诊断(PROFINET 或 PROFIBUS)
313--------诊断指令
314 --------RD_SINFO(读取当前 OB 启动信息)
315 --------LED(读取 LED 状态)
316---------Get_IM_Data(读取标识和维护数据)
317-------- Get_Name(读取 PROFINET IO 设备的名称)
318-------- GetStationInfo(读取 PROFINET IO 设备的 IP 或 MAC 地址)
319-------- DeviceStates 指令
320-------- DeviceStates 组态示例
321-------- ModuleStates 指令
322-------- DeviceStates 组态示例
323-------- GET_DIAG(读取诊断信息)
324--------分布式 I/O 的诊断事件
325--------脉冲
326--------CTRL_PWM(脉宽调制)
327-------- CTRL_PTO(脉冲串输出)
328--------脉冲输出的作用
329--------为 PWM 或 PTO 组态脉冲通道
330--------配方和数据日志
331--------配方
332--------配方概述
333--------配方示例
334--------传送配方数据的程序指令
335--------配方实例程序
336--------数据日志
337--------数据日志记录结构
338--------控制数据日志的程序指令
339--------使用数据日志
340--------数据日志文件大小的限制
341--------数据日志示例程序
342--------数据块控制
343 --------CREATE_DB(创建数据块)
344 --------READ_DBL 和 WRIT_DBL(读取/写入装载存储器中的数据块)指令
345 --------ATTR_DB(读取数据块属性)
346 --------DELETE_DB(删除数据块)
347--------处理地址
348 --------GEO2LOG(根据插槽确定硬件标识符)
349-------- LOG2GEO(根据硬件标识符确定插槽)
350-------- IO2MOD(根据 I/O 地址确定硬件标识符)
360--------RD_ADDR(根据硬件标识符确定 IO 地址)
361--------GEOADDR 系统数据类型
362--------扩展指令的常见错误代码
363--------工艺指令
364--------计数(高速计数器)
365--------CTRL_HSC_EXT(控制高速计数器)指令
366--------指令概述
367--------示例
368--------CTRL_HSC_EXT 指令系统数据类型 (SDT)
369--------使用高速计数器。
370--------1同步功能
371--------门功能
372--------捕获功能
373--------比较功能
374--------应用
375--------组态高速计算器
376-------- HSC 的类型
377--------运行阶段
378--------初始值
379--------输入功能
380--------输出功能
381--------中断事件
382--------硬件输入针脚分配
383--------硬件输出引脚的分配
384--------HSC 输入存储器地址
385--------硬件标识符
386--------早期的 CTRL_HSC(控制高速计数器)指令
387--------指令概述
388--------使用 CTRL_HSC
389--------HSC 当前计数值
390--------PID 控制
391--------插入 PID 指令和工艺对象
392--------PID_Compact
393--------PID_Compact 指令
394--------PID_Compact 指令过程值限制
395--------PID_Compact 指令 ErrorBit 参数
396--------PID_Compact 指令的警告参数
397--------PID_3Step
398--------PID_3Step 指令
399-------- PID_3Step 指令的 ErrorBit 参数
400-------- PID_3Step 指令的警告参数
401---------PID_Temp
402---------PID_Temp 指令
403---------PID_温度错误位参数
404---------PID_温度警告参数
405---------组态 PID_Compact 和 PID_3Step 控制器
406---------组态 PID_Temp 控制器
407---------调试 PID_Compact 和 PID_3Step 控制器
408---------调试 PID_Temp 控制器
409---------运动控制
410-------- “定相”(Phasing)
411--------组态脉冲发生器
412--------开环运动控制
413--------组态轴
414--------调试
415--------闭环运动控制
416--------组态轴
417-------- ServoOB
418--------速度控制操作
419--------消息帧 4 支持
420--------仿真轴
421--------数据调整
422--------使用 TM 脉冲模块进行的轴控制
423--------组态 TO_CommandTable_PTO
424--------的运动控制的操作
425--------用于运动控制的 CPU 输出
426--------用于运动控制的硬件和软件限位开关
427--------回原点
428--------冲击限制
429--------运动控制指令
430--------MC 指令概述
431--------MC_Power(释放/阻止轴)
432--------MC_Reset(确认错误)
433--------MC_Home(使轴归位)
434--------MC_Halt(暂停轴)
435 -------MC_MoveAbsolute(以方式定位轴)
436--------MC_MoveRelative(以相对方式定位轴)
437--------MC_MoveVelocity(以预定义速度移动轴)
438--------MC_MoveJog(在点动模式下移动轴)
439--------MC_CommandTable(按运动顺序运行轴命令)
440-------- MC_ChangeDynamic(更改轴的动态设置)
441-------- MC_WriteParam(写入工艺对象的参数)
442-------- MC_ReadParam 指令(读取工艺对象的参数)
443--------监视激活的命令
444--------监视具有输出参数“Done”的 MC 指令
445--------监控 MC_Velocity
446--------监控 MC_MoveJog
447--------运动控制的 ErrorID 和 ErrorInfo
448--------通信
449--------异步通信连接
450-------- PROFINET
451--------创建网络连接
452--------组态本地/伙伴连接路径
453--------分配 Internet 协议 (IP) 地址
454--------为编程设备和网络设备分配 IP 地址
455--------检查编程设备的 IP 地址
456--------在线给 CPU 分配 IP 地址
457--------为项目中的 CPU 组态 IP 地址
458--------测试 PROFINET 网络
459--------查找 CPU 上的以太网 (MAC) 地址
460--------组态网络时间协议 (NTP) 同步
461--------PROFINET 设备启动时间、命名和地址分配
462--------开放式用户通信
463--------协议
464--------TCP 和 ISO on TCP
465--------通信服务和使用的端口号
466--------特殊模式
467--------开放式用户通信指令的连接 ID
468-------- PROFINET 连接的参数
469--------组态 DNS
470-------- TSEND_C 和 TRCV_C 指令
471--------早期 TSEND_C 和 TRCV_C 指令
472-------- TCON、TDISCON、TSEND 和 TRCV 指令
473-------早期 TCON、TDISCON、TSEND 和 TRCV 指令
474--------T_RESET(终止和重新建立现有连接)指令
475--------T_DIAG(检查连接状态和读取信息)指令
476--------TMAIL_C(通过 CPU 的以太网接口发送电子邮件)指令
477--------UDP
478--------TUSEND 和 TURCV
479--------T_CONFIG
480--------指令的公共参数
481--------与编程设备通信
482--------建立硬件通信连接
483--------配置设备
484--------分配 Internet 协议 (IP) 地址
485--------测试 PROFINET 网络
486--------HMI 到 PLC 通信
487--------组态两个设备之间的逻辑网络连接
488--------PLC 到 PLC 通信
489--------组态两个设备之间的逻辑网络连接
490--------组态两台设备间的本地/伙伴连接路径
491--------组态传送(发送)和接收参数
492--------配置 CPU 和 PROFINET IO 设备
493--------添加 PROFINET IO 设备
494--------分配 CPU 和设备名称
495--------分配 Internet 协议 (IP) 地址
496--------组态 IO 循环时间
497--------组态 CPU 和 PROFINET 智能设备
498--------智能设备功能
499--------智能设备的性能和优势
500--------智能设备的特性
501--------上位 IO 系统与下位 IO 系统之间的数据交换
502--------组态智能设备
503--------共享设备
504--------共享设备的功能
505--------示例: 组态共享设备(GSD 组态)
506--------示例:将智能设备组态为共享设备
507--------介质冗余协议 (MRP)
508--------环形拓扑的介质冗余
509--------使用介质冗余协议 (MRP)
510--------组态介质冗余
511-------- S7 路由
512--------CPU 和 CP 接口之间的 S7 路由
513--------两个 CP 接口之间的 S7 路由
514--------禁用 SNMP
515--------禁用 SNMP
516--------诊断
517--------分布式 I/O 指令
518--------诊断指令
519--------分布式 I/O 的诊断事件
520--------通信
521 --------GET 和 PUT(从远程 CPU 读取和写入)
522--------创建 S7 连接
523--------组态两台设备间的本地/伙伴连接路径
524-------- GET/PUT 连接参数分配
525--------连接参数
526--------组态 CPU 间的 S7 连接
527 --------IP 地址访问 CPU 时的做法
528 --------OPC UA 服务器
529---------OPC UA 服务器组态
530---------激活 OPC UA 服务器
531-------- OPC UA 服务器的设置
532--------OPC UA 服务器安全
533--------支持的安全策略
534--------受信客户端
535--------用户认证
536--------OPC UA 服务器接口
537--------1支持的数据类型
538-------- PLC表示
539 --------可下载的服务器接口
540--------通信处理器和Modbus TCP
541--------使用串行通信接口
542--------偏置和端接 RS485 网络连接器
543--------点对点 (PtP) 通信
544-------- PtP,自由口通信
545--------3964(R) 通信
546--------组态 PtP 自由口通信
547--------管理流控制
548--------组态传送(发送)参数
549--------组态接收参数
550--------组态 3964(R) 通信
551--------组态 3964(R) 通信端口
552--------组态 3964(R) 优先级和协议参数
553--------点对点指令
554--------点对点指令的公共参数
555-------- Port_Config(动态组态通信参数)
556-------- Send_Config(动态组态串行传输参数)
557-------- Receive_Config(动态组态串行接收参数)
558--------P3964_Config(组态 3964(R) 协议)
559--------Send_P2P(传输发送缓冲区数据)
560--------Receive_P2P(启用消息接收)
561--------Receive_Reset(删除接收缓冲区)
562-------- Signal_Get(查询 RS-232 信号)
563--------Signal_Set(设置 RS-232 信号)
564 --------Get_Features
565--------Set_Features
566--------设计 PtP 通信
567--------轮询架构
568--------示例: 点对点通信
569--------组态通信模块
570-------- RS422 和 RS485 工作模式
571--------编写 STEP 7 程序
572--------组态终端仿真器
573--------运行示例程序
574--------通用串行接口 (USS) 通信
575--------选择 USS 指令的版本
576--------使用 USS 协议的要求
577 --------USS 指令
578-------- USS_Port_Scan(使用 USS 网络编辑通信)
579--------USS_Drive_Control(与驱动器交换数据)
580--------USS_Read_Param(从驱动器读取参数)
581--------USS_Write_Param(修改驱动器中的参数)
582-------- USS 状态代码
583--------USS 常规驱动器设置要求
584--------示例: USS 常规驱动器连接和设置
585--------Modbus 通信
586-------- Modbus RTU 和 Modbus TCP 通信概述
587--------Modbus TCP
588--------概述
589--------选择 Modbus TCP 指令的版本
590-------- Modbus TCP 指令
591--------Modbus TCP 示例
592-------- Modbus RTU
593--------概述
594--------选择 Modbus RTU 指令的版本
595--------最多支持的 Modbus 从站数量
596-------- Modbus RTU 指令
597-------- Modbus RTU 示例
598--------早期 PtP 通信(仅限 CM/CB 1241)
599--------早期点对点指令
600--------PORT_CFG(动态组态通信参数)
601--------SEND_CFG(动态组态串行传输参数)
602--------RCV_CFG(动态组态串行接收参数)
603--------SEND_PTP(传输发送缓冲区数据)
604--------RCV_PTP(启用消息接收)
605-------- RCV_RST(删除接收缓冲区)
606--------SGN_GET(查询 RS-232 信号
607--------SGN_SET(设置 RS-232 信号)
608--------早期 USS 通信(仅 CM/CB 1241)
609--------选择 USS 指令的版本
610--------使用 USS 协议的要求
611--------早期 USS 指令
612-------- USS_PORT(使用 USS 网络编辑通信)指令
613-------- USS_DRV(与驱动器交换数据)指令
614-------- USS_RPM(从驱动器读取参数)指令
615--------USS_WPM(更改驱动器中的参数)指令
616--------旧 USS 状态码
617--------早期 USS 常规驱动器设置要求
618--------早期 Modbus TCP 通信
619--------概述
620--------选择 Modbus TCP 指令的版本
621--------早期 Modbus TCP 指令
622-------- MB_CLIENT(将 PROFINET 用作 Modbus TCP 客户端进行通信)
623--------MB_SERVER(将 PROFINET 用作 Modbus TCP 客户端进行通信)
624--------早期 Modbus TCP 示例
625--------示例: 早期 MB_SERVER 多个 TCP 连接
626--------示例: 早期 MB_CLIENT 1: 通过公共 TCP 连接发送多个请求
627--------示例: 早期 MB_CLIENT 2: 通过不同的 TCP 连接发送多个请求
628--------示例: 早期 MB_CLIENT 3: 输出映像写入请求
629--------示例: 早期 MB_CLIENT 4: 协调多个请求
630--------早期 Modbus RTU 通信(仅 CM/CB 1241)
631--------概述
632--------选择 Modbus RTU 指令的版本
633--------早期 Modbus RTU 指令
634-------- MB_COMM_LOAD(针对 Modbus RTU 组态 PtP 模块上的端口)
635--------MB_MASTER(作为 Modbus RTU 主站使用 PtP 端口通信)
636--------MB_SLAVE(作为 Modbus RTU 从站使用 PtP 端口通信
637--------早期 Modbus RTU 示例
638--------示例: 早期 Modbus RTU 主站程序
639--------示例: 早期 Modbus RTU 从站程序
640--------在线和诊断工具
641--------状态 LED
642--------转到在线并连接到 CPU
643--------在线为 PROFINET IO 设备分配名称
644--------设置 IP 地址和日时钟
645--------复位为出厂设置
646--------更新固件
647--------通过 STEP 7 格式化 SIMATIC 存储卡
648--------在线 CPU 的 CPU 操作员面板
649--------监视循环时间和存储器使用情况
650--------显示 CPU 中的诊断事件
651--------比较离线 CPU 与在线 CPU
652--------比较在线/离线拓扑
653--------监视和修改 CPU 中的值
654--------转到在线模式监视 CPU 中的值
655--------显示程序编辑器中的状态
656--------捕获 DB 在线值快照用于恢复值操作
657--------使用监视表格来监视和修改 CPU 中的值
658--------监视或修改 PLC 变量时使用触发器
659--------在 STOP 模式下启用输出
660--------CPU 中的强制值
661--------使用强制表格
662--------强制功能的操作
663--------在 RUN 模式下下载
664-------- “在 RUN 模式下下载”的先决条件
665--------在 RUN 模式下更改程序
666--------下载所选块
667--------其它块中存在编译错误时下载选定的单个块
668--------在 RUN 模式下修改和下载现有块
669--------下载失败时的系统响应
670--------在 RUN 模式下下载的考虑事项
671--------根据触发条件跟踪并记录 CPU 数据
672--------确定 SM 1231 模块的断路条件类型
673--------备份和恢复数据 CPU
674--------备份与恢复选项
675--------备份在线 CPU
676--------恢复 CPU
677-------- CPU 1211C
678--------常规规范和特性
679-------- CPU 1211C 支持的定时器、计数器和代码块
680--------数字量输入和输出
681--------模拟量输入
682--------CPU 内置模拟量输入的阶跃响应
683--------CPU 内置模拟端口的采样时间
684--------模拟量输入的电压测量范围 (CPU)
685--------CPU 1211C 接线图
686--------CPU 1212C
687--------常规规范和特性
688--------CPU 1212C 支持的定时器、计数器和代码块
689--------数字量输入和输出
690--------模拟量输入
691--------CPU 内置模拟量输入的阶跃响应
692--------CPU 内置模拟端口的采样时间
693--------模拟量输入的电压测量范围 (CPU)
694--------CPU 1212C 接线图
695--------CPU 1214C
696--------常规规范和特性
697--------CPU 1214C 支持的定时器、计数器和代码块
698--------数字量输入和输出
699--------模拟量输入
700-------- CPU 内置模拟量输入的阶跃响应
701--------CPU 内置模拟端口的采样时间
702-------模拟量输入的电压测量范围 (CPU)
703--------CPU 1214C 接线图
704--------CPU 1215C
705--------常规规范和特性
706--------CPU 1215C 支持的定时器、计数器和代码块
707--------数字量输入和输出
708--------模拟量输入和输出
709-------- CPU 内置模拟量输入的阶跃响应
710--------CPU 内置模拟端口的采样时间
711--------模拟量输入的电压测量范围 (CPU)
712--------模拟量输出规格
713--------CPU 1215C 接线图
714--------CPU 1217C
715--------常规规范和特性
716--------CPU 1217C 支持的定时器、计数器和代码块
717--------数字量输入和输出
718--------模拟量输入和输出
719--------模拟量输入规范
720--------CPU 内置模拟量输入的阶跃响应
721--------CPU 内置模拟端口的采样时间
722--------模拟量输入的电压测量范围 (CPU)
723--------模拟量输出规格
724--------CPU 1217C 接线图
725--------CPU 1217C 差分输入 (DI) 的详细信息和应用示例
726--------CPU 1217C 差分输出 (DQ) 的详细信息和应用示例
727--------数字信号模块 (SM)
728--------SM 1221 数字量输入规范
729--------SM 1222 8 点数字量输出规范
730--------SM 1222 16 点数字量输出规范
731--------SM 1223 数字量输入/输出 V DC 规范
732--------SM 1223 数字量输入/输出 V AC 规范
733--------模拟信号模块 (SM)
734--------SM 1231 模拟量输入模块规范
735--------SM 1232 模拟量输出模块规范
736--------SM 1234 模拟量输入/输出模块规范
737--------模拟量输入的阶跃响应
738--------模拟量输入的采样时间和更新时间
739--------模拟量输入的电压和电流测量范围(SB 和 SM)
740--------模拟量输出的电压和电流测量范围(SB 和 SM)
741--------热电偶和 RTD 信号模块 (SM)
742--------SM 1231 热电偶
743--------热电偶的基本操作
744-------- SM 1231 热电偶选型表
745--------SM 1231 RTD
746--------SM 1231 RTD 选型表
747--------工艺模块
748--------SM 1278 4xIO-Link 主站 SM
749-------- SM 1278 4xIO-Link 主站概述
750--------连接
751--------参数/地址空间
752--------中断、错误和系统报警
753--------数字信号板 (SB)
754-------- SB 1221 200 kHz 数字量输入规范
755--------SB 1222 200 kHz 数字量输出规范
756--------SB 1223 200 kHz 数字量输入/输出规范
757--------SB 1223 2 X 24 V DC 输入/2 X 24 V DC 输出规格
758-------模拟信号板 (SB)
759 --------SB 1231 1 路模拟量输入规范
760--------SB 1232 1 路模拟量输出规范
761--------模拟量输入和输出的测量范围
762--------模拟量输入的阶跃响应
763--------模拟量输入的采样时间和更新时间
764--------模拟量输入的电压和电流测量范围(SB 和 SM)
765--------模拟量输出的电压和电流测量范围(SB 和 SM)
766--------热电偶信号板 (SB)
767--------SB 1231 1 路热电偶模拟量输入规范
768--------热电偶的基本操作
769-------- RTD 信号板 (SB)
770--------SB 1231 1 路模拟量 RTD 输入的规范
771--------SB 1231 RTD 选型表
772--------BB 1297 电池板
【教学优势】
一对一教学有西门子,ABB,施耐德,三菱,欧姆龙,一人一机,和利时DCS,ABB,施耐德,三菱,欧姆龙,均为中型机(对标西门子1500)且人手一机。涵盖PLC+触摸屏+上位机+变频私服+电气设计(非识图,接线,认识原件等小学生技术)+柜子设计+造价+现场施工真正做到全面性,系统性。
【师资优势】
郑州地区设备型号最全,课程最多,技术最深入,涵盖PLC+触摸屏+上位机+变频私服+电气设计+柜子设计+造价+现场施工。7个月-12个月的系统化培训。使你更加符合企业所需。西门子,ABB,施耐德,三菱,欧姆龙,和利时DCS,使你入行或就业拥有更高的竞争力。

【环境优势】
各个教室不在同一地区,距离均超过2公里,做到真正的10人小班,互不干扰,真正的一对一指导教学。封闭式考研模式,学员之间不能互相干扰,以确保各个学员的学习质量。
【机构简介】
盛世合工业技术有限公司为一家专业自动化技术服务集成商,下设有自动化工程PLC,DCS设计部,电气成套设计,实施部,财务部,综合管理部,采购部,宣传部及工业技术咨询服务及企业自控技术指导等自化专业技术服务部门。企业有着相当成熟的自动化工程经验。涵盖水厂,泵站,智慧林业,城市智慧管网调度,热力,物联网技术,矿山,砂石骨料生产线,水泥生产线,建材回收生产线,固体废物处理回收生产线,钢铁,食品,饮料,及肥料生产线的系统设计集成及电气成套设计经验及丰富的机电设备安装工程。郑州公司为我司技术服务为主体业务,为客户及学员提供全套的,系统性,专业性的技术指导及服务,涉及PLC,触摸屏,DCS,上位机,变频器技术,伺服技术,步进技术,电气系统技术,为企业及个人提供优质的技术咨询及服务。

校区地址
学校相册
更多 >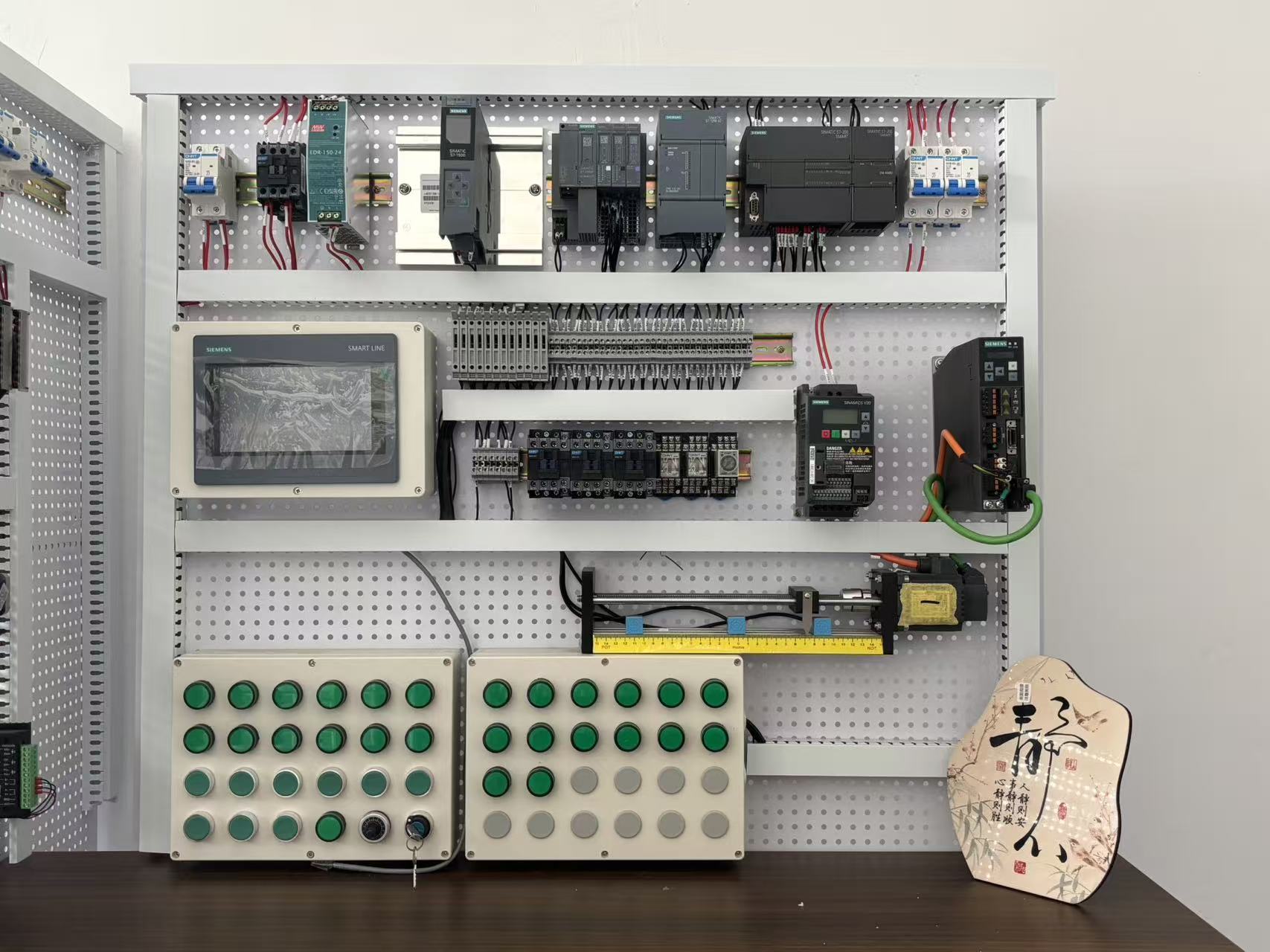



看过的人还关注了
更多适合课程
全城PLC编程学校,一网打尽,立即搜索:
在线预约免费试听




.png)
.png)
.png)
.png)




 官方授权声明
官方授权声明

 粤公网安备 44010602004272号
粤公网安备 44010602004272号